JLU professor makes progress in robot technology
With growth in demand for collaborative work and coexistence between humanoid robots and humans, improving the naturalness, economy, environmental adaptability, flexibility, and load capacity of robots while ensuring the safety of human-machine physical interaction has become a major challenge in the field.
In response to this issue, Professor REN Lei from Jilin University’s College of Biological and Agricultural Engineering proposed the theory and technology system of biomimetic tensile and compressive body robots internationally in 2017. He was approved to lead the National Natural Science Foundation of China's major "Inclusive Robot" research plan, developing a biomimetic tensile and compressive body walking robot that reproduced the three-dimensional natural walking gait of the human body.
The key project was awarded named “excellent” in 2023 and was listed as one of two exemplary robot projects by the National Natural Science Foundation of China.



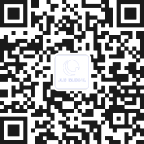
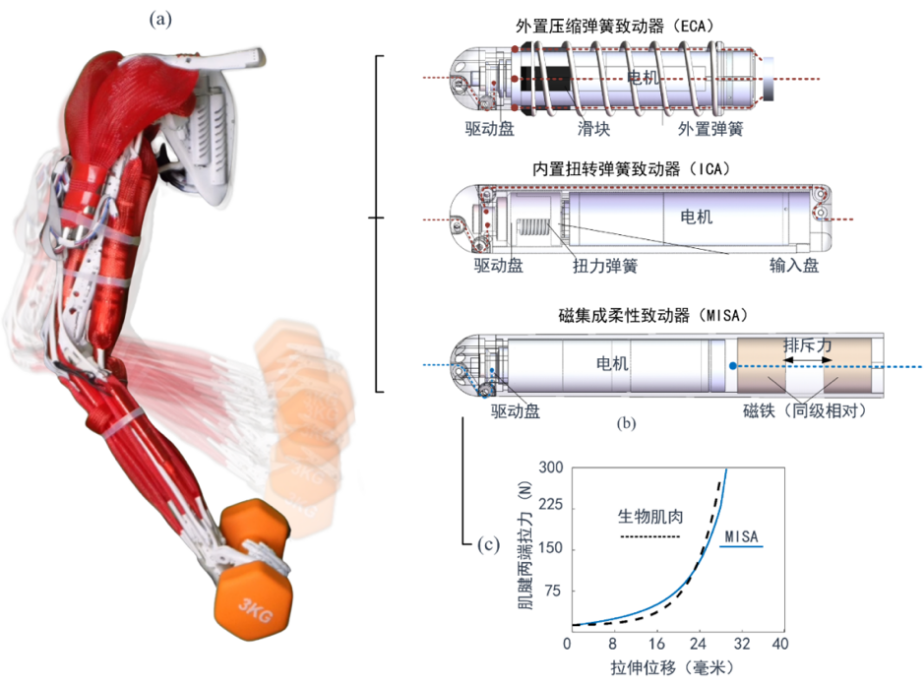
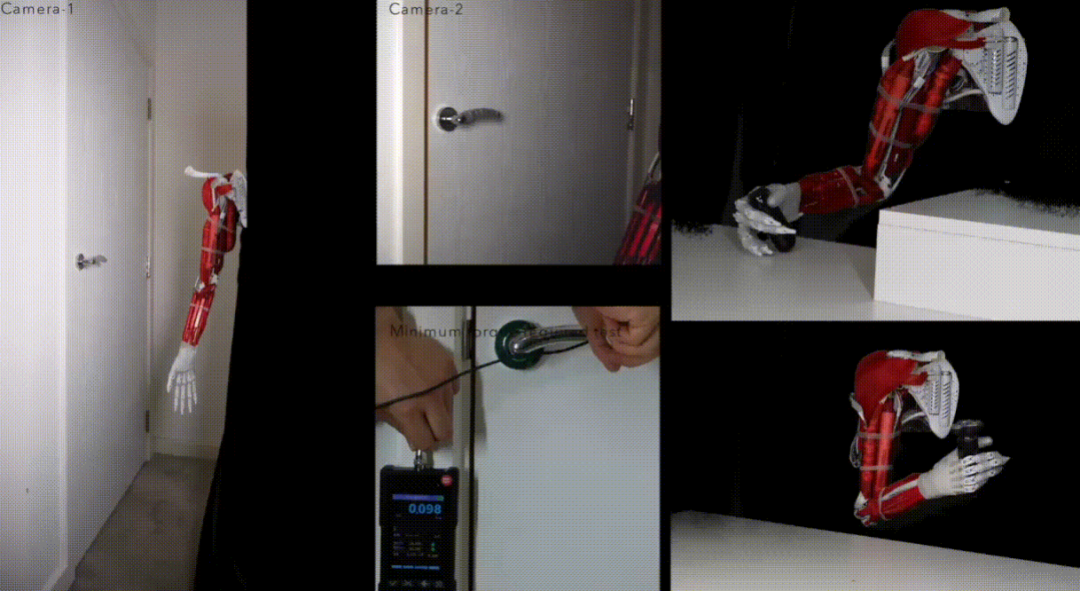
REN’s team recently invented a biomimetic skeletal muscle artificial muscle technology based on magnetic current collector driven flexible drive (IEEE Robotics and Automation Letters, 2023, 8, 2373-2380; Advanced Bionics, 2025, 1, 2-18) and developed a biomimetic tension compression body arm system using this technology, reproducing highly humanoid arm dexterity control. It achieves fine dexterity control in limited spaces and has high load performance far beyond traditional robotic arms (IEEE Transactions on Robotics, 2024, 40, 2672-2691; IEEE Transactions on Robotics, 2024, 40, 2692-2711).
These achievements showcase the complex "mechanical intelligence" of biomimetic tensile and compressive robot systems, providing important theoretical and technical support for future biomimetic robot design and opening up smarter and more efficient directions for the development of robots.